2013年11月28日
特约作者:迪克·詹姆斯

Xbox Kinect之一
就像我们在Xbox One的文章中所说的,全新的Kinect是一款非常复杂的设备,所以我们决定用一篇完整的文章来阐述它。
我们注意到新的Kinect的第一个主要区别是它通过相当合计的电缆连接 - 没有WiFi了。该装置基本上由两部分组成,位于支架前部的麦克风杆,以及光学组件坐在上面可倾斜的安装座上。




在Xbox One Kinect内
让我们看看里面
当我们进去的时候,我们可以看到有一个风扇和一个相当大的散热器,所以这东西显然变得非常热;还有两个摄像头,不只是打开保护套的那一个。很明显,前面板是有色的,但透明的,因为在金属框架内部有窗户。这里的初步结论是,有透明窗口的相机是彩色的,而另一个是红外的。






Xbox One Kinect组件
从板上取下组件
当我们从前板上取下组件时,在两个摄像头后面和较大的PC板的左侧都有热敏垫。左边(彩色)相机连接到上位PC板,而红外相机有自己的板。



电路板
的电路板
当我们解剖较大的前板时,很明显有一个电源模块在中心,有一个TI TPS 54622包括同步级步SWIFT™转换器,以及一个TI LMV339低压比较芯片在左边。在右边,我们有可能是另一组相机,但当我们把模板从板上拿下来,它似乎是一组滤波器超过三个led。从它们安装的铝制块来看,它们是Kinect的主要热源。






在板后面,我们有三个INSL58302零件,似乎是激光二极管驱动器(我们可以找到ISL58303,但不是ISL58302),所以可能“led”是红外激光二极管,而不是led。电源后面是一个TI Ciclon CSD25401 Nexfet™功率MOSFET.还有一种NB3L 14S我们还没找到。
所有这些都证实了Kinect具有主动红外照明以及红外相机作为其3d成像和测距功能的一部分。

设备赢得了
设备赢得了
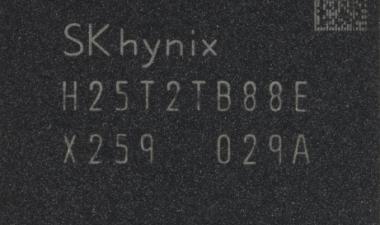
顶板没有高度填充,但它确实有一些有趣的部分。从左侧开始是MACRONIX MX25L25635F 256 MB串行闪存,然后是SK Hynix H5TC1G633EFR 1 GB(128 MB)DDR3L SDRAM,具有一对在SEMI NCP6922C电源管理IC上。然后我们拥有Microsoft X871141-001 SoC,它替换了第一个Kinect中使用的主要感测芯片。通过STMicroelectronics的字体和包裹代码的外观。在右侧,我们拥有更多的电源电路,具有一对Ti同步降压转换器(TPS54325和TPS54225)和SEMI NCL30161恒定电流降压调节器。
电路板的背面几乎没有芯片,但有一个Kionix KXUD9三轴加速度计,以及看起来像另一个意法半导体或博世Sensortec MEMS设备(S903 PHVG 333Y)。鉴于Kinect并不是一个可以挥舞的控制器,这似乎有点奇怪,但也许它是为了在人们在弹性木地板上跳来跳去时的摄像头图像稳定。






红外相机
红外相机
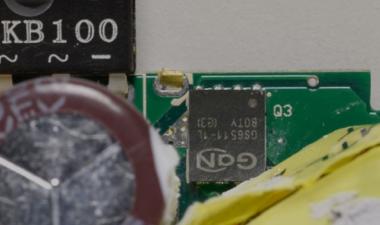
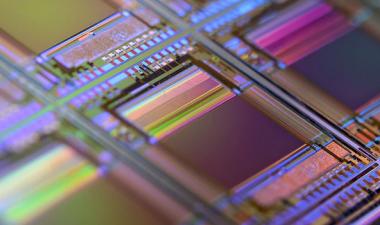
我们差不多完成,但仍然存在红外线摄像板,并且麦克风的基地里还有一个小板。
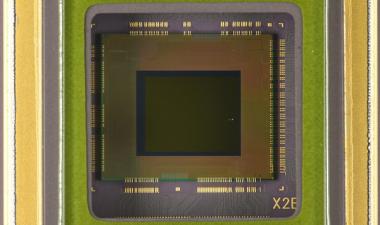
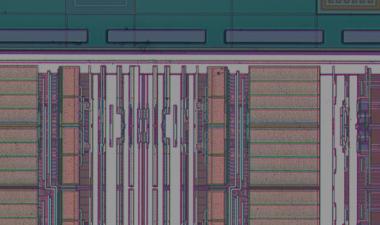
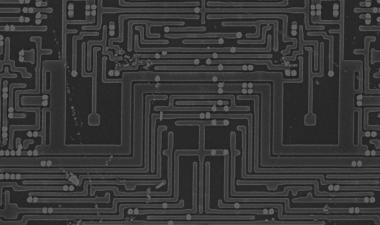
摄像头板很简单,只有一个电源管理模块,包括另一个TPS54325和摄像头。电路板可能是简单的,但相机绝对是不同的-现在我们有模具照片,这是相当复杂的标准票价,我们得到的DSC或手机。像素阵列在中心,但在两侧有一些相当大的电路块,显然是做一些信号处理的。这是一个惊喜——这是为Xbox 360 Kinect升级设计的吗?





麦克风
麦克风
看看麦克风条,它有不少于四个麦克风,在一个3 + 1配置,在板上我们有两个Wolfson WM8737立体声adc。那么多麦克风可能有一些密集的声音消除处理。Wolfson在第一个带有相同部件的Kinect中取得了胜利,但只使用了一个——现在他们已经翻倍了!


提升的性能
提升的性能
既然我们已经了解了Kinect的内部功能,我们也就知道它改进性能背后的原因了。首先,我们有广角1080p彩色和红外摄像机,它们都连接到主控制台的Southbridge芯片上。
3D深度分辨率的关键似乎是主动光照;红外相机配备了一个定时发生器,它可以高频地打开和关闭激光二极管,并告诉相机灯是开还是关。通过对两个信号进行一些计算比较,可以生成三幅图像——一幅普通灰度图像、一幅深度图像和另一幅独立于环境光照的灰度图像。SemiAccurate的Charlie Demerjian在这里和这里对方法做了更详细的描述;完整的细节在8月份的Hot Chips会议上发表了,并将在1月份发布在他们的网站上)。
但似乎还有其他的事情在发生,因为我们有三个激光二极管,它们上面的过滤器看起来像一个网格;也许二极管是按顺序开关的,网格是投射的,以帮助系统的运动检测部分。
微软有发布了一段视频可以显示Kinect所看到的不同图像。
当我们在它的时候,也有一个演示的深度人体模型内建的系统。

所以全部,我们拥有一系列令人印象深刻的技术,内置在Kinect中。怜悯我们不得不撕毁它!